إعدادات: Wheeled, محتويات: Fully Assembled,
إعدادات: Robot Components, نظام الربط: Makeblock Me, محتويات: Bracket(s), Cable(s), Hardware, Servo(s),
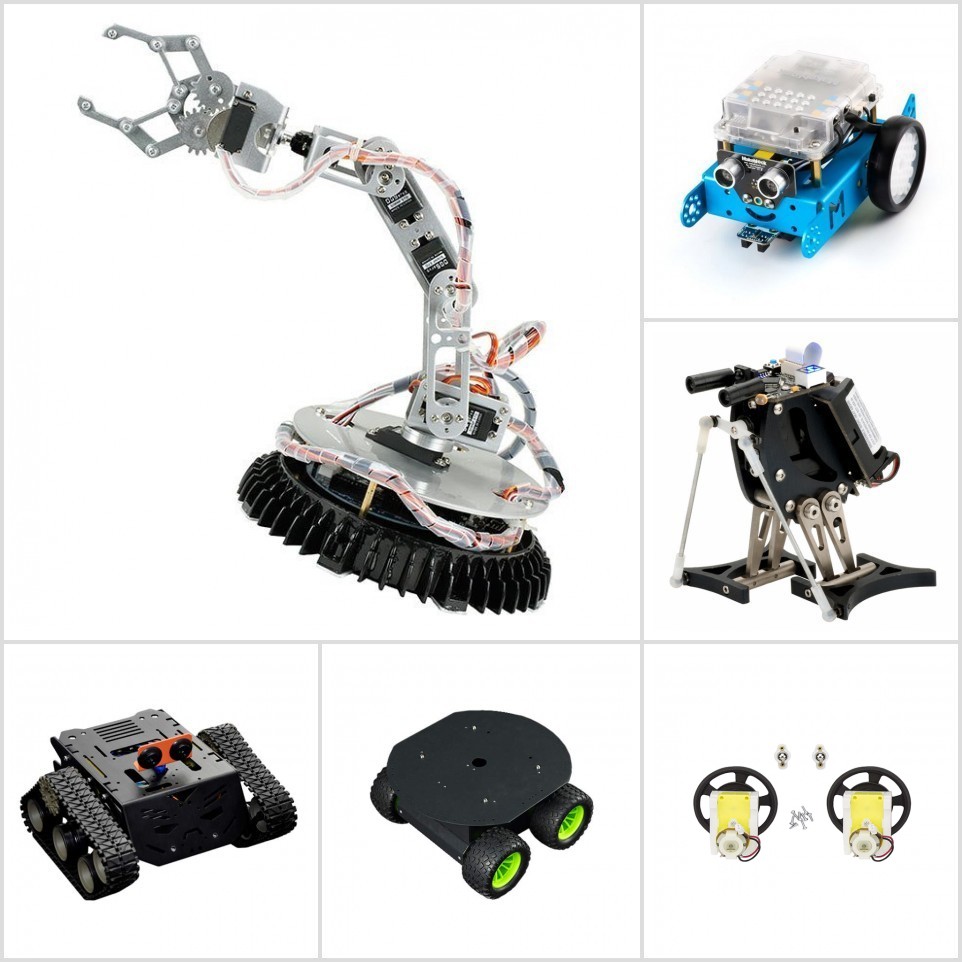
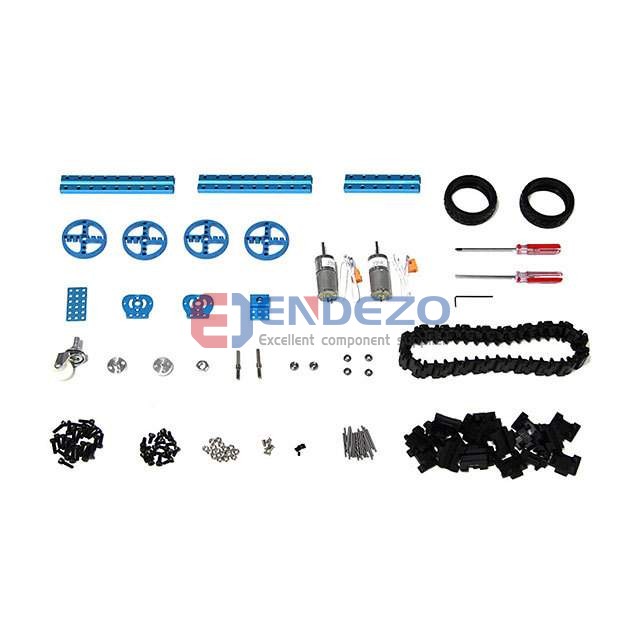
إعدادات: Wheeled, محتويات: Chassis, Hardware, Motor(s), Wheel(s),
إعدادات: Gripper, محتويات: Case, Driver, Pump, Suction Cup(s), Tube(s),
إعدادات: Robot Components, محتويات: Beam(s), Hardware, Plate(s),
إعدادات: Plotter, XY, محتويات: Hardware, Laser Engraver,
إعدادات: Wheeled, نظام الربط: Arduino R3 Shield, Raspberry Pi HAT (40 pin), محتويات: Board(s), Chassis, Components, Hardware, Motor(s), Wheel(s),
إعدادات: Plotter, XY, محتويات: Cable(s), Frame, Hardware, Motor(s),
استخدام IC / الجزء: ATmega328, نظام الربط: Makeblock Me, بيئة البرمجة المقترحة: Arduino IDE, mBlock, تضمين لوحة MCU / MPU: Me Orion,
إعدادات: Robot Components, محتويات: Vision Sensor,
إعدادات: Tank Tread, محتويات: Chassis, Hardware, Motor(s), Treads, Wheel(s),
إعدادات: Gripper, محتويات: Cable(s), Gripper,
إعدادات: Robot Components, نظام الربط: Makeblock Me, محتويات: Hardware, Sensor(s),
إعدادات: Pan/Tilt, محتويات: Chassis, Hardware, Servo(s),
إعدادات: Wheeled, استخدام IC / الجزء: ATmega328, نظام الربط: Makeblock Me, بيئة البرمجة المقترحة: Arduino IDE, mBlock, تضمين لوحة MCU / MPU: mCore, محتويات: Board(s), Chassis, Components, Hardware, Manual, Motor(s), Wheel(s),
إعدادات: Tank Tread, محتويات: Chassis, Components, Gripper, Hardware, Servo(s), Treads, Wheel(s),
إعدادات: Wheeled, استخدام IC / الجزء: RPR-220, نظام الربط: Arduino R3 Shield, محتويات: Fully Assembled,
إعدادات: Arm, استخدام IC / الجزء: ATmega2560, محتويات: Bluetooth Module, Components, Hardware, uArm(s),
إعدادات: Tank Tread, محتويات: Board(s), Chassis, Components, Motor(s), Servo(s), Treads, Wheel(s),
إعدادات: Plotter, XY, استخدام IC / الجزء: A4988, نظام الربط: Makeblock Me, بيئة البرمجة المقترحة: Arduino IDE, mBlock, تضمين لوحة MCU / MPU: Me Baseboard, محتويات: Components, Frame, Hardware, Motor(s), Servo(s),
إعدادات: Servo Block, محتويات: Bracket(s), Hardware, Servo(s),
إعدادات: Servo Actuators, تضمين لوحة MCU / MPU: Quirkbot Board, محتويات: Board(s), Cable(s), Components, Hardware, Servo(s),
إعدادات: Spider, محتويات: Fully Assembled,
إعدادات: Wheeled, نظام الربط: micro:bit, محتويات: Fully Assembled,
إعدادات: Wheeled, استخدام IC / الجزء: ATmega328, نظام الربط: Makeblock Me, بيئة البرمجة المقترحة: Arduino IDE, mBlock, تضمين لوحة MCU / MPU: Me Orion, محتويات: Board(s), Cable(s), Chassis, Hardware, Sensor(s), Treads, Wheel(s),
إعدادات: Solar Power, محتويات: Components, Servo(s), Solar Panel(s),
إعدادات: Arm, نظام الربط: Arduino R3 Shield, بيئة البرمجة المقترحة: Arduino IDE, محتويات: Board(s), Cable(s), Chassis, Power Supply, Servo(s),
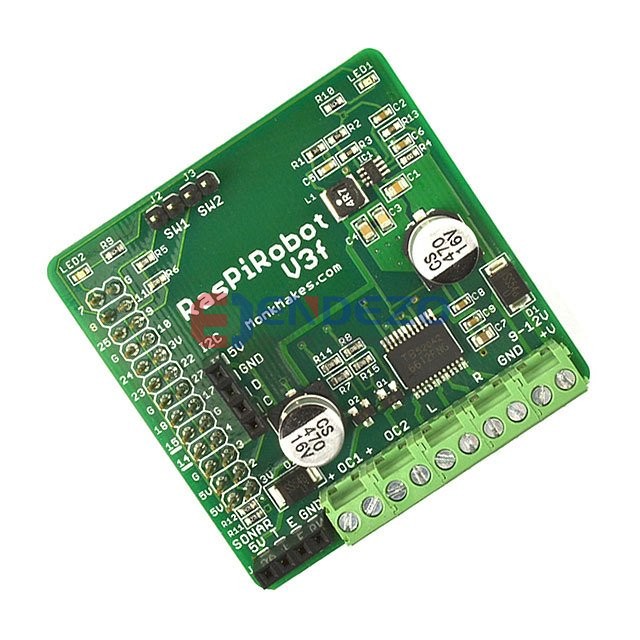
إعدادات: Robot Components, استخدام IC / الجزء: TB6612FNG, نظام الربط: Raspberry Pi HAT (26 pin), محتويات: Main Board(s),
إعدادات: Servo Actuators, محتويات: Board(s), Chassis, Components, Hardware, Servo(s),
إعدادات: Quadcopter, استخدام IC / الجزء: STM32F405, nRF51822, MPU-9250, LPS25H, نظام الربط: Crazyflie, تضمين لوحة MCU / MPU: Crazyflie 2.0 control board, محتويات: Battery, Board(s), Components, Hardware, Motor(s), Propeller(s),
إعدادات: Wheeled, استخدام IC / الجزء: ATmega32U4, نظام الربط: Arduino R3 Shield, بيئة البرمجة المقترحة: Arduino IDE, تضمين لوحة MCU / MPU: Livera, محتويات: Board(s), Chassis, Components, Hardware, Manual, Motor(s), Wheel(s),
إعدادات: Wheeled, بيئة البرمجة المقترحة: SLAMWARE, تضمين لوحة MCU / MPU: SLAMWARE Core, محتويات: Board(s), Components,