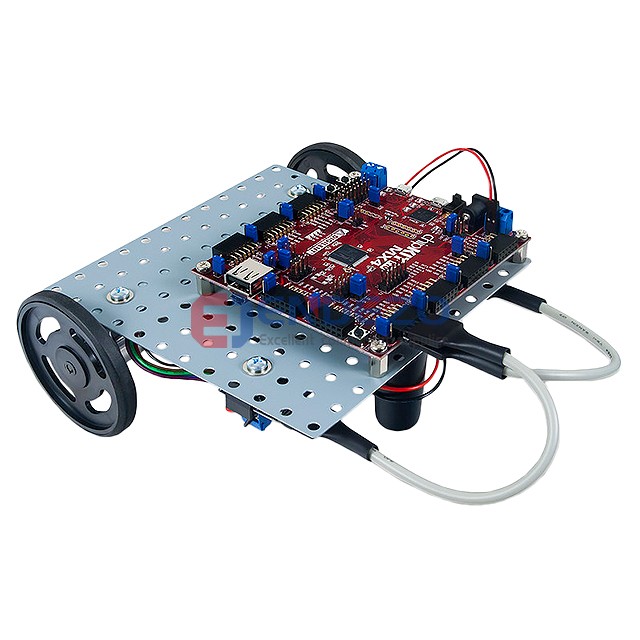
إعدادات: Wheeled, استخدام IC / الجزء: PIC32MX320F128, نظام الربط: Pmod, بيئة البرمجة المقترحة: MPLAB® IDE, تضمين لوحة MCU / MPU: Cerebot™ MX3cK, محتويات: Board(s), Cable(s), Chassis, Components, Hardware, Servo(s), Wheel(s),
إعدادات: Robot Components, محتويات: Hardware, Sensor(s),
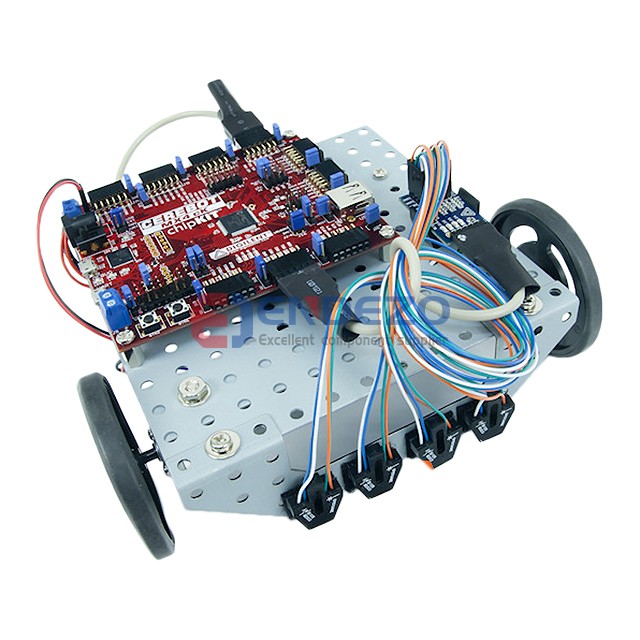
إعدادات: Wheeled, استخدام IC / الجزء: PIC32MX460F512L, نظام الربط: Pmod, بيئة البرمجة المقترحة: MPLAB® IDE, تضمين لوحة MCU / MPU: Cerebot™ MX3cK, محتويات: Board(s), Cable(s), Chassis, Components, Hardware, Servo(s), Wheel(s),
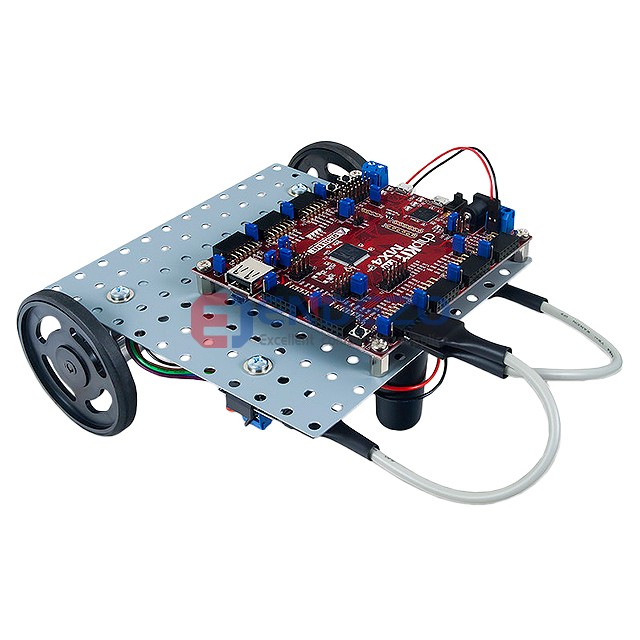
إعدادات: Wheeled, استخدام IC / الجزء: PIC32MX460F512L, تضمين لوحة MCU / MPU: Cerebot™ MX3cK, محتويات: Board(s), Cable(s), Components, Hardware, Wheel(s),
إعدادات: Wheeled, استخدام IC / الجزء: PIC32MX320F128, تضمين لوحة MCU / MPU: Cerebot™ MX3cK, محتويات: Board(s), Cable(s), Components, Hardware, Wheel(s),