جزء الأسهم: 125
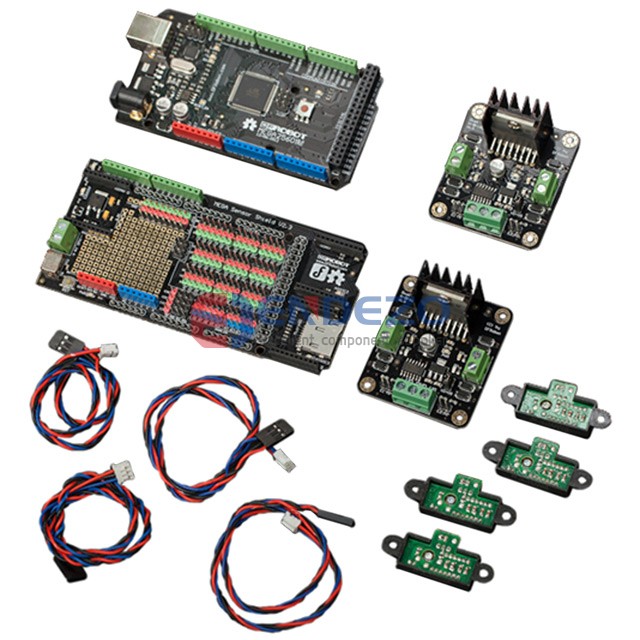
إعدادات: Wheeled, استخدام IC / الجزء: ATmega32U4, URM37, نظام الربط: Arduino R3 Shield, Gravity, Xbee, بيئة البرمجة المقترحة: Arduino IDE, تضمين لوحة MCU / MPU: DFRobot Romeo V2, محتويات: Board(s), Cable(s), Chassis, Components, Hardware, Sensor(s), Servo(s), Wheel(s),